Nội dung chính
1. Khái niệm dao động, dao động tuần hoàn
– Dao động cơ học: Là chuyển động của vật lặp đi lặp lạiquanh một vị trí xác định. Vị trí xác định đógọi là vị trí cân bằng.
Đang xem : Li độ là gì
– Dao động tuần hoàn: Là dao động mà trạng thái của vật được lặp đi lặp lại như cũ sao những khoảng thời gian xác định.
+ Chu kì dao động (T): Là thời gian để vật thực hiện hết một dao động toàn phần. Đơn vị: s(giây).
+ Tần số giao động ( f ) : Số giao động mà vật triển khai trong một đơn vị chức năng thời hạn ( thường là giây ). Đơn vị : Hz ( Héc ) .
Ví dụ : f = 100H z ( Leftrightarrow ) Vật triển khai 100 xê dịch trong một giây, như vậy, mỗi dao động vật thực thi hết ( frac { 1 } { 100 } ) s. Do đó, chu kì T = ( frac { 1 } { 100 } ) s .
+ Mối quan hệ với chu kì : ( f = frac { 1 } { T } )
– Ví dụ về dao động:
+ Bông hoa lay động trên cành cây khi có gió nhẹ .
+ Trên mặt hồ gợn sóng, mẩu gỗ nhấp nhô lên xuống .
+ Dây đàn rung lên khi ta gảy đàn .
2. Thế nào là dao động điều hòa
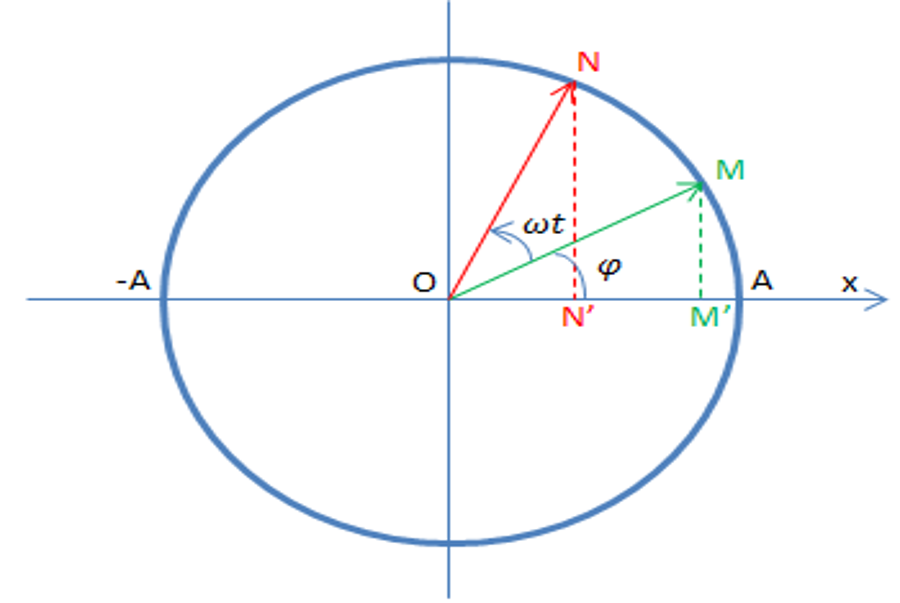
– Ví dụ về dao động điều hòa: Ở bài kiến thức bổ trợ, ta thấy chuyển động của hình chiếu của chuyển động tròn đều lên trục Ox có đặc điểm lặp đi lặp lại nhiều lần quanh gốc O, mà tọa độ của nó theo quy luật hàm cosin. Người ta nói đó là dao động điều hòa.
– Khái niệm: Dao động điều hòa là dao động mà tọa độ của vật được biểu diễn theo một hàm cos (hoặc sin)theo thời gian.
–Phương trình tổng quát:(oxed{x=Acos(omega.t+varphi)})
Trong đó :
x : Li độ, là độ rời của vật so với vị trí cân đối. A : Biên độ, là li độ cực lớn, A > 0 ( omega ) : Tần số góc của giao động. ( varphi ) : Pha ban đầu, xác lập trạng thái khởi đầu của vật, ( – pi leq varphi leq pi ) ( omega t + varphi ) : Pha xê dịch, giúp xác lập trạng thái của xê dịch .
Xem thêm : Giới thiệu về ngành ise là gì ? nghĩa của từ ise trong tiếng việt
– Bản chất: Dao động điều hòa là chuyển động củahình chiếu của một chuyển động tròn đều lên một trục tọa độ thuộc mặt phẳng quỹ đạo.

Chuyển động của hình chiếu của M trên trục Ox là giao động điều hoà
– Chu kì, tần số:
+ Chu kì: Từ hình vẽ trên ta thấy, khi vật thực hiện 1 dao động toàn phần thì chuyển động tròn đều tương ứng quay được 1 vòng, do đó chu kì dao động điều hoà bằng chu kì chuyển động tròn đều tương ứng:(oxed{T=dfrac{2pi}{omega}})
+ Tần số : Là số giao động toàn phần vật triển khai trong 1 s : ( oxed { f = dfrac { 1 } { T } } )
3. Vận tốc, gia tốc trong dao động điều hòa
– Xét một chất điểm giao động điều hòa với phương trình : ( x = A cos ( omega t + varphi ) ) ( 1 )
+ Vận tốc : ( v = x ” _ { ( t ) } = – omega A sin ( omega t + varphi ) ) ( 2 )
+ Gia tốc : ( a = v ” _ { ( t ) } = – omega ^ 2 A cos ( omega t + varphi ) ) ( 3 )
– Nhận xét :
+ Áp dụng đẳng thức : ( sin ^ 2 alpha + cos ^ 2 alpha = 1 ), rút cos ( ) và sin ( ) ở ( 1 ) và ( 2 ) thế vào ta được :
((frac{x}{A})^2+(frac{v}{omega A})^2 = 1)(Rightarrow)(oxed{A^2=x^2+dfrac{v^2}{omega^2}})(4)
+ Lấy ( 1 ) thế vào ( 3 ) ta được : ( oxed { a = – omega ^ 2 x } ) ( 5 )
(4) và (5) là hai công thức độc lập thời gian giữa li độ, vận tốc và gia tốc.
4. Độ lệch pha của hai dao động
– Xét hai xê dịch điều hòa cùng tần số :
( x_1 = A_1 cos ( omega t + varphi_1 ) ) < 1 >
( x_2 = A_2 cos ( omega t + varphi_2 ) ) < 2 >
– Độ lệch pha của hai xê dịch : ( Delta varphi = ( omega t + varphi_2 ) – ( omega t + varphi_1 ) = varphi_2 – varphi_1 )
– Nhận xét :
+ ( Delta varphi > 0 Rightarrow varphi_2 > varphi_1 ), ta nói xê dịch < 2 > sớm pha hơn xê dịch < 1 > .
+ ( Delta varphi, ta nói xê dịch < 1 > trễ pha hơn giao động < 2 > .
+ ( Delta varphi = 0 ), hai xê dịch cùng pha .
+ ( Delta varphi = pm pi ), hai giao động ngược pha .
+ ( Delta varphi = pm frac { pi } { 2 } ), hai xê dịch vuông pha .
– Ví dụ :
+ Từ ( 2 ) : ( v = – omega A sin ( omega t + varphi ) = omega A cos ( omega t + varphi + frac { pi } { 2 } ) ) ( Rightarrow ) Vận tốc sớm pha ( frac { pi } { 2 } ) so với li độ .
+ Từ ( 3 ) : ( a = – omega ^ 2 A cos ( omega t + varphi ) = omega ^ 2 A cos ( omega t + varphi + pi ) ) ( Rightarrow ) Gia tốc ngược pha so với li độ .
5. Viết phương trình dao động điều hòa
– Phương trình tổng quát : ( x = A cos ( omega t + varphi ) )
( v = – omega A sin ( omega t + varphi ) )
– Để viết phương trình xê dịch, ta lần lượt tìm giá trị của ( omega, A, varphi )
+ Tìm ( omega ) : Dựa theo giả thiết bài toán về hệ xê dịch như thế nào, hay tính theo chu kì, tần số : ( omega = frac { 2 pi } { T } = 2 pi f )
+ Tìm A : Có thể tính theo công thức độc lập, theo tốc độ, tần suất cực lớn, hoặc theo độ dài quỹ đạo của giao động, …
Xem thêm : 25/6 Là Cung Gì – Cung Cự Giải Sinh Ngày 25 Tháng 6
+ Tìm ( varphi ) : Dựa theo điều kiện kèm theo khởi đầu, vật đang ở li độ ( x_0 ), tốc độ ( v_0 ), ta tìm ( varphi ) theo hệ phương trìnhsau :
(left{ egin{array}{} cos varphi = frac{x_0}{A}\ v_0 > 0 hay v_0 (Rightarrowleft{ egin{array}{} cos varphi = frac{x_0}{A}\ sin varphi 0 end{array}
ight.)
– Ví dụ: Một chất điểm dao động điều hòa với quỹ đạo dài 8cm, thực hiện 300 dao động trong 1 phút. Chọn gốc tọa độ ở VTCB, mốc thời gian khi vật qua li độ 2 cm theo chiều dương. Viết phương trình dao động.
Lời giải :
Phương trình tổng quát : ( x = A cos ( omega t + varphi ) )
Thời điểm ban đầu:(left{ egin{array}{} x_0 = 2 cm\ v_0 >0 end{array}
ight.)(Rightarrowleft{ egin{array}{} cos varphi = frac{2}{4}\ sin varphi (Rightarrow varphi = -frac{pi}{3})(rad)
Source: http://139.180.218.5
Category: Thuật ngữ đời thường